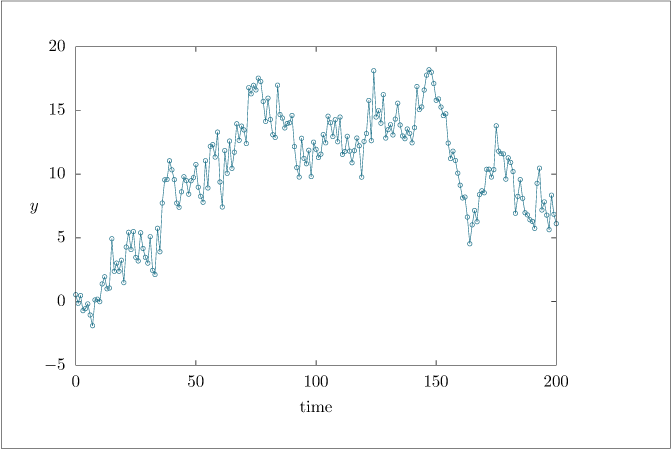
# Example noisy dataset.importnumpyasnpimportmatplotlib.pyplotaspltfrommiscimportgnuplotsaveimportos# Example noisy dataseta=1c=1r=1q=1x0=1q0=1nsim=201x=np.zeros(nsim+1)# Add 1 for Python indexingy=np.zeros(nsim)t=np.arange(nsim)np.random.seed(0)x[0]=x0+np.sqrt(q0)*np.random.randn()foriinrange(nsim):y[i]=c*x[i]+np.sqrt(r)*np.random.randn()x[i+1]=a*x[i]+np.sqrt(q)*np.random.randn()ifnotos.getenv('OMIT_PLOTS')=='true':plt.figure(figsize=(8,6))plt.plot(t,y,'-o',markersize=2)plt.grid(True)plt.savefig('noisy.png')plt.close()# Save data to fileoutput=np.column_stack((t,y))gnuplotsave('noisy.dat',output)