← Back to Figures Figure 8.11:
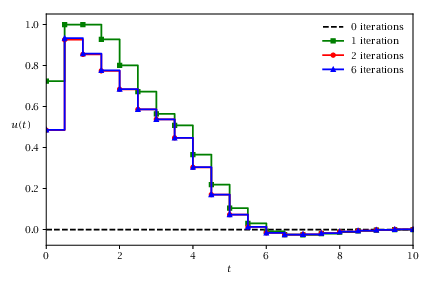
Gauss-Newton iterations for the direct multiple-shooting method
Code for Figure 8.11
Text of the GNU GPL .
dms_gn.py
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180 # Direct multiple-shooting Gauss-Newton SQP solver using CasADi/qpoases.
#
# Mirrors functions/dms_gn.m. ocp must contain CasADi symbolic expressions:
# 'x' : casadi.SX/MX state vector
# 'u' : casadi.SX/MX control vector
# 'ode' : casadi.SX/MX state derivative
# 'lsq' : casadi.SX/MX least-squares residuals
#
# data dict keys: 'T', 'x0', 'xN', 'x_min', 'x_max', 'x_guess',
# 'u_min', 'u_max', 'u_guess'
# opts dict keys: 'N', 'verbose' (optional)
import numpy as np
import casadi
class DmsGn :
def __init__ ( self , ocp , data , opts ):
self . ocp = ocp
self . data = data
self . opts = opts
self . verbose = opts . get ( 'verbose' , True )
# Problem dimensions
self . N = opts [ 'N' ]
self . nx = ocp [ 'x' ] . numel ()
self . nu = ocp [ 'u' ] . numel ()
# Time grid
self . t = np . linspace ( 0 , data [ 'T' ], self . N + 1 )
# Interval length
self . dt = data [ 'T' ] / self . N
# Containers populated by rk4/transcribe/init_gauss_newton
self . fun = {}
self . nlp = {}
self . sol = {}
# Discrete-time dynamics (RK4) and the least-squares residual function
self . _rk4 ()
# Transcribe to NLP
self . _transcribe ()
# Initialise decision variable and trajectories
self . sol [ 'w' ] = self . nlp [ 'w0' ]
x_traj , u_traj = self . fun [ 'traj' ]( self . sol [ 'w' ])
self . sol [ 'x' ] = np . array ( x_traj )
self . sol [ 'u' ] = np . array ( u_traj )
# Build Gauss-Newton QP solver
self . _init_gauss_newton ()
def _rk4 ( self ):
x = self . ocp [ 'x' ]
u = self . ocp [ 'u' ]
ode = self . ocp [ 'ode' ]
f = casadi . Function ( 'f' , [ x , u ], [ ode ], [ 'x' , 'p' ], [ 'ode' ])
k1 = f ( x , u )
k2 = f ( x + 0.5 * self . dt * k1 , u )
k3 = f ( x + 0.5 * self . dt * k2 , u )
k4 = f ( x + self . dt * k3 , u )
xk = x + self . dt / 6.0 * ( k1 + 2 * k2 + 2 * k3 + k4 )
self . fun [ 'F' ] = casadi . Function ( 'RK4' , [ x , u ], [ xk ],
[ 'x0' , 'p' ], [ 'xf' ])
lsq = self . ocp [ 'lsq' ]
self . fun [ 'Lsq' ] = casadi . Function ( 'Lsq' , [ x , u ], [ lsq ],
[ 'x' , 'p' ], [ 'lsq' ])
def _transcribe ( self ):
w = []
g = []
M = []
lbw = []
ubw = []
w0 = []
x_plot = []
u_plot = []
xk = casadi . MX . sym ( 'x0' , self . nx )
w . append ( xk )
lbw . append ( self . data [ 'x0' ])
ubw . append ( self . data [ 'x0' ])
w0 . append ( self . data [ 'x_guess' ])
x_plot . append ( xk )
for k in range ( self . N ):
uk = casadi . MX . sym ( 'u {} ' . format ( k ), self . nu )
w . append ( uk )
lbw . append ( self . data [ 'u_min' ])
ubw . append ( self . data [ 'u_max' ])
w0 . append ( self . data [ 'u_guess' ])
u_plot . append ( uk )
Fk = self . fun [ 'F' ]( x0 = xk , p = uk )
x_next = Fk [ 'xf' ]
M . append ( self . fun [ 'Lsq' ]( xk , uk ))
xk = casadi . MX . sym ( 'x {} ' . format ( k + 1 ), self . nx )
w . append ( xk )
if k == self . N - 1 :
lbw . append ( self . data [ 'xN' ])
ubw . append ( self . data [ 'xN' ])
else :
lbw . append ( self . data [ 'x_min' ])
ubw . append ( self . data [ 'x_max' ])
w0 . append ( self . data [ 'x_guess' ])
x_plot . append ( xk )
g . append ( xk - x_next )
self . nlp [ 'w' ] = casadi . vertcat ( * w )
self . nlp [ 'g' ] = casadi . vertcat ( * g )
self . nlp [ 'M' ] = casadi . vertcat ( * M )
self . nlp [ 'lbw' ] = casadi . vertcat ( * lbw )
self . nlp [ 'ubw' ] = casadi . vertcat ( * ubw )
self . nlp [ 'w0' ] = casadi . vertcat ( * w0 )
self . fun [ 'traj' ] = casadi . Function (
'traj' , [ self . nlp [ 'w' ]],
[ casadi . horzcat ( * x_plot ), casadi . horzcat ( * u_plot )],
[ 'w' ], [ 'x' , 'u' ])
def _init_gauss_newton ( self ):
self . nlp [ 'J' ] = casadi . jacobian ( self . nlp [ 'g' ], self . nlp [ 'w' ])
self . nlp [ 'JM' ] = casadi . jacobian ( self . nlp [ 'M' ], self . nlp [ 'w' ])
self . nlp [ 'H' ] = self . nlp [ 'JM' ] . T @ self . nlp [ 'JM' ]
self . nlp [ 'c' ] = self . nlp [ 'JM' ] . T @ self . nlp [ 'M' ]
self . fun [ 'g' ] = casadi . Function ( 'g' , [ self . nlp [ 'w' ]], [ self . nlp [ 'g' ]],
[ 'w' ], [ 'g' ])
self . fun [ 'J' ] = casadi . Function ( 'J' , [ self . nlp [ 'w' ]], [ self . nlp [ 'J' ]],
[ 'w' ], [ 'J' ])
self . fun [ 'H' ] = casadi . Function ( 'H' , [ self . nlp [ 'w' ]],
[ self . nlp [ 'H' ], self . nlp [ 'c' ]],
[ 'w' ], [ 'H' , 'c' ])
qp = dict ( h = self . nlp [ 'H' ] . sparsity (), a = self . nlp [ 'J' ] . sparsity ())
qp_options = dict ()
if not self . verbose :
qp_options [ 'printLevel' ] = 'none'
self . fun [ 'qp_solver' ] = casadi . conic ( 'qp_solver' , 'qpoases' , qp ,
qp_options )
self . n_iter = 0
self . sol [ 'norm_dw' ] = np . inf
def sqpstep ( self ):
self . n_iter += 1
w = self . sol [ 'w' ]
self . sol [ 'g' ] = self . fun [ 'g' ]( w )
self . sol [ 'J' ] = self . fun [ 'J' ]( w )
H_ , c_ = self . fun [ 'H' ]( w )
self . sol [ 'H' ] = H_
self . sol [ 'c' ] = c_
qp_solution = self . fun [ 'qp_solver' ](
a = self . sol [ 'J' ], h = self . sol [ 'H' ], g = self . sol [ 'c' ],
lbx = self . nlp [ 'lbw' ] - w , ubx = self . nlp [ 'ubw' ] - w ,
lba =- self . sol [ 'g' ], uba =- self . sol [ 'g' ], x0 = 0 )
dw = np . array ( qp_solution [ 'x' ]) . flatten ()
self . sol [ 'norm_dw' ] = float ( np . linalg . norm ( dw ))
self . sol [ 'w' ] = w + dw
x_traj , u_traj = self . fun [ 'traj' ]( self . sol [ 'w' ])
self . sol [ 'x' ] = np . array ( x_traj )
self . sol [ 'u' ] = np . array ( u_traj )
if self . verbose or self . n_iter % 10 == 1 :
print ( '-' * 70 )
print ( ' {:>15s} {:>15s} ' . format ( 'SQP iteration' , 'norm(dw)' ))
print ( ' {:15d} {:15g} ' . format ( self . n_iter , self . sol [ 'norm_dw' ]))
main.py
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57 # [makes] vdp_gauss_newton.mat
# [depends] functions/dms_gn.py
# Solves the minimization problem with T=10
# minimize 1/2*integral{t=0 until t=T}(x1^2 + x2^2 + u^2) dt
# subject to dot(x1) = (1-x2^2)*x1 - x2 + u, x1(0)=0, x1(T)=0
# dot(x2) = x1, x2(0)=1, x2(T)=0
# x1(t) >= -0.25, 0<=t<=T
# Joel Andersson, UW Madison 2017
import os
import sys
sys . path . insert ( 0 , os . path . join ( os . path . dirname ( os . path . abspath ( __file__ )), 'functions' ))
import numpy as np
import casadi
from scipy.io import savemat
from dms_gn import DmsGn
# States and control
x1 = casadi . SX . sym ( 'x1' )
x2 = casadi . SX . sym ( 'x2' )
u = casadi . SX . sym ( 'u' )
# Model equations
x1_dot = ( 1 - x2 ** 2 ) * x1 - x2 + u
x2_dot = x1
# Least squares objective terms
lsq = casadi . vertcat ( x1 , x2 , u )
# Problem structure
ocp = dict ( x = casadi . vertcat ( x1 , x2 ), u = u ,
ode = casadi . vertcat ( x1_dot , x2_dot ), lsq = lsq )
# Problem data
data = dict ( T = 10.0 ,
x0 = np . array ([ 0.0 , 1.0 ]),
xN = np . array ([ 0.0 , 0.0 ]),
x_min = np . array ([ - 0.25 , - np . inf ]),
x_max = np . array ([ np . inf , np . inf ]),
x_guess = np . array ([ 0.0 , 0.0 ]),
u_min =- 1.0 , u_max = 1.0 , u_guess = 0.0 )
# Solver options
opts = dict ( N = 20 , verbose = False )
# Create an OCP solver instance
s = DmsGn ( ocp , data , opts )
# Track u iterates across SQP iterations
u_all = s . sol [ 'u' ][ 0 , :] . reshape ( 1 , - 1 )
while s . sol [ 'norm_dw' ] > 1e-8 :
s . sqpstep ()
u_all = np . vstack (( u_all , s . sol [ 'u' ][ 0 , :] . reshape ( 1 , - 1 )))
tgrid = s . t
savemat ( 'vdp_gauss_newton.mat' , { 'tgrid' : tgrid , 'u_all' : u_all })